- It is a four layered PNPN device and is a prominent member of thyristorfamily. It consists of three diodes connected back to back with gate connection or two complementary transistor connected back to back.
- It is widely used as switching device in power control applications. It canswitch ON for variable length of time and delivers selected amount of power to load.
- It can control loads, by switching the current OFF and ON up to manythousand times a second. Hence it possess advantage of RHEOSTAT and a switch with none of their disadvantages
Construction
As shown in figure 1 it is a four layered three terminal device, layers being
alternately P-type and N-type silicon. Junctions are marked J1, J2, J3 whereas terminals are anode (A), cathode
(C) and gate
(G). The gate terminal is connected to inner P-type layer and it controls the firing or switching of 5CR.
Biasing
The biasing of SCR is shown in figure
1(a). The junction J1 and J3 become
forward biased while J2 is reverse biased. In figure 1 polarity is reversed. It is seen that now junction J1 and J3 become reverse biased and only J2 is forward biased.
Operation of SCR
- In SCR a load is connected in series with anode and is kept at positivepotential with respect to cathode when the gate is open i.e., no voltage is applied at the gate.
- Under this condition, junctions J1 and J3 are for ward biased and junction J2is reverse biased. Due to this, no current flows through RL and hence the 8CR is cutoff.
- However when the anode voltage is increased gradually to breakover voltage,then breakdown occurs at junction J due to this charge carriers are able to flow from cathode to anode easily, hence SCR starts conducting and is said tobe in ON state.
- The SCR offers very small forward resistance so that it allows infinitely highcurrent. The current flowing through the 8CR is limited only by the anode voltage and external resistance.
- If the battery connections of the applied voltage are reversed as shown infigure 2 the junction J1 and J3 are reverse biased. J2 is forward biased.
- If the applied reverse voltage is small the SCR is OFF and hence no currentflows through the device.
- If the reverse voltage is increased to reverse breakdown voltage, the junctionJ1 and J3 will breakdown due to avalanche effect. This causes current to flow through the SCR.
- From the above discussion we conclude that the SCR can be used to conduct only in forward direction. Therefore SCR is called as “unidirectional device”.
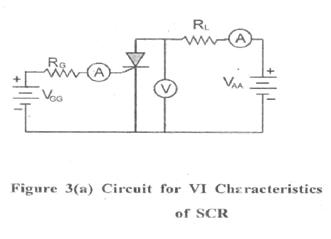
Vl Characteristics of SCR
The
“forward characteristics” of SCR may be obtained using the figure 3.
The volt-ampere characteristics of a SCR for IG = 0 is shown in figure 3.
- As the applied anode to cathode voltage is increased above zero, very smallcurrent flows through the device, under this condition the 5CR is off. It will be continued until; the applied voltage reaches the forward Breakover voltage (point A).
- if the anode-cathode (applied) voltage exceeds the Breakover voltage itconducts heavily the SCR turns ON and anode to cathode voltage decreases quickly to a point B because, under this condition the 5CR offers very low resistance hence it drops very low voltage across it.
- At this stage the 5CR allows more current to low through it. The amplitude ofthe current is depending upon the supply voltage and load resistance connected in the circuit.
- The current corresponding to the point ‘B’ is called the “holding current (IH)”It can be defined as the minimum value of anode current required to keep the SCR in ON State. If the 5CR falls below this holding current the SCR turns OFF.
- If the value of the gate current I is increased above zero, (‘G > O) the SCRturns ON even at lower Breakover voltage as shown in figure 3(b).
- The region lying between the points OA is called forward blocking region. Inthis region 5CR is OFF’. The region lying between the points BC is called forward conduction region. In this region SCR is ON.
- Once the SCR is switched ON then the gate looses all the control. So SOBcannot be turned OFF by varying the gate voltage. It is possible only by reducing the applied voltage.
To obtain the
“reverse characteristics”the following points are followed.
1.In this case the SCR is reverse biased, if the applied reverse voltage is increased above zero, hence a very small current flows through the SCR.
Under this condition the SCR is OFF, it continues till the applied reverse voltage reaches breakdown voltage.
2.As the applied reverse voltage is increased above the breakdown voltage, the avalanche breakdown occurs hence 5CR starts conducting in the reverse direction. It is shown in curve DE. Suppose the applied voltage is increased to a very high value, the device may get damaged.
SCR rating
The SCR rating are defined as follows
1) “Forward Breakover voltage”:It is the voltage at which the 5CR is switched from its OFF position to ON position. Its: values are maximum for zero gate current, its values lie in the range of 50 to l200volts
2) “Holding current”: it is the minimum value of anode current required to keep the SCR in ON position.
3) “Gate triggering current”: It is the value of anode current necessary to switch 5CR from OFF to ON position under specified condition. It is typically about 4OmA.
4) “Average forward current”: It is the maximum value of anode current at which the 5CR can handle in its ON position. Its value lies in the range of 1 to 1800Amps.
5) “Reverse breakdown voltage”: It is the value of reverse voltage between cathode to anode at which the avalanche breakdown occurs.
6) “Turn ON time – TON”: It can be defined as, the time required to switch it from OFF to ON state when triggering signal is applied. TON decreases if the trigger voltage is increased; TON is increases when anode current increases.
7) “Turn OFF Time – TOFF”: It is the time required to switch it from ON to OFF state by dropping anode voltage. TOFF is small if anode voltage in reverse direction and increases with temperature and anode current.
8) “Gate Recovery time”: It is the time required for which anode voltage is reduced to VH to turn OFF SCR.
Basic Operation of an SCR
The operation of a PNPN device can best be visualized as a specially coupled
pair of transistors as shown in Figure
The connections between the two transistors are such that regenerative action can occur when a proper gate signal is applied to the base of the NPN transistor. Normal leakage current is so low that the combined hFE of the specially coupled two- transistor feedback amplifier is less than unity, thus keeping the circuit in an off- state condition. A momentary positive pulse applied to the gate will bias the NPN transistor into conduction which, in turn, biases the PNP transistor into conduction. The effective hFE momentarily becomes greater than unity so that the specially coupled transistors saturate. Once saturated, current through the transistors is enough to keep the combined hFE greater than unity. The circuit will remain “on” until it is “turned off” by reducing the anode-to-cathode current (IT) such that the combined hFE is less than unity and regeneration ceases; this threshold anode current is the holding current of the SCR.
Electrical Characteristic Curves of Thyristors V-I Characteristics of SCR Device
Methods of Switching on Thyristors There are three general ways to switch thyristors to on-state condition:
- Application of Gate Signal
- Voltage Breakover Turn-On
Listed below is a brief description of each method.
Application Of Gate Signal
For an SCR (unilateral device), this signal must be positive with respect to the cathode polarity. A triac (bilateral device) can be turned on with gate signal of either polarity; however, different polarities have different requirements of IGT and VGT which must be satisfied. Since a diac does not have a gate, this method of turn-on is not applicable to diacs; in fact, the single major application of diacs is to switch-on triacs.
Static dv/dt Turn-On
Comes from a fast rising voltage applied across the anode and cathode terminals of an SCR or the main terminals of a triac. Due to the nature of thyristor construction, a small junction capacitor is formed across each PN junction. Figure 14.14 shows how typical internal capacitors are linked in gated thyristors. When voltage is impressed suddenly across a PN junction, a charging current will flow which is equal to:
i = C (dv/dt)
When c (dv/dt) becomes greater or equal to thyristor IGT, the thyristor switches on. Normally, this type of turn on does not damage or hurt the device providing the surge current is limited. Generally, thyristor application circuits are designed with static dv/dt snubber networks if fast rising voltages are
anticipated.
Voltage Breakover Turn-On
Is the method used to switch on diacs. However, exceeding voltage break over of SCRs and triacs is definitely not recommended as a turn-on method. In the case of SCRs and triacs, the leakage current increases until it exceeds the gate current required to turn-on these gated thyristors in a small localized point. When turn-on occurs by this method, there is localized heating in a small area which may melt the silicon or damage the device if di/dt of the increasing current is not sufficiently limited. Diacs used in typical phase control circuits are basically protected against excessive current at breakover as long as the firing capacitor is not excessively large. When diacs are used in a zener function, current limiting is necessary.